

Computergesteuerter Kameraroboter verwendet Schritt- und Servomotor-Controller von JVL
|
Bewegungsgesteuerte Animation mit Spezialeffekten mit einem speziell konstruierten dänischen Kameraroboter
Im Laufe vieler Jahre hat das dänische Unternehmen CMC umfangreiches Wissen und Know-how durch Allan O. Lückows zahlreiche Reisen in die USA und nach Großbritannien erworben, die in Verbindung mit der Aufzeichnung animierter Filme mit eigens konstruierten motorgesteuerten Kameraanordnungen unternommen wurden. Diese Filmtechnik, die in großem Umfang für die Arbeit mit Puppen und für Werbespots verwendet wird, erfordert einen Computer, um die Position der Kamera in Bezug auf das Subjekt zu steuern und in jeder Position einzelne Bilder aufzunehmen. Auf diese Weise wird der Eindruck erweckt, dass der Film in Echtzeit aufgenommen wurde. Die Kamera wird auf einem Roboter montiert und alle Bewegungen werden mit Motoren gesteuert. Die Motoren selbst werden über einen Computer, auf dem spezielle Software läuft, angesteuert. Der Computer bewegt nicht nur die Kamera zwischen den einzelnen Aufnahmen, sondern steuert auch die Beleuchtung, und Objekte auf Modell-Movern können vom selben Computer aus, gesteuert durch Motoren und Treiber, animiert werden. Über die Jahre war JVL A/S an der Entwicklung solcher Kameraroboter bei CMC beteiligt, dank unseres Know-hows im Bereich der Motorsteuerung und durch Lieferung von Schrittmotoren, Getrieben und Treibern. Der neueste Kameraroboter von CMC wird von insgesamt 10 Schrittmotoren mit zugehörigen JVL-Treibern gesteuert. Ein großer AC-Servomotor mit Yaskawa-Treiber (ebenfalls von JVL gesteuert) sorgt dafür, dass sich der Roboter auf Schienen vorwärts und rückwärts bewegen kann. Die zehn Schrittmotoren steuern: 1) Kamerawagen vorwärts/rückwärts 2) Kameraarm Drehung 3) Kameraarm nach oben - nach unten 4) Kameraschwenk, Drehung: vertikal, Drehung, horizontal 5) Zoom und „fester Knotenpunkt", Scharfeinstellung 6) Kameramotor 7) Verschiedene „Modell-Mover" zum Verschieben von Objekten Die Treiber werden durch einen leistungstarken PC mit Schritt- und Richtungssignalen gesteuert. Als Software wird RTMC 48 (Real Time Motion Control) von Kuper Controls verwendet, die neben Ein/Aus-Funktionen bis zu 48 Motoren steuern kann. Der gesamte Zeitablauf einer solchen Filmaufnahme kann z.B. mit einem SMPTE Time Code gesteuert werden, der für vollständige Synchronisierung von Audio-, Bild- und Videosignalen sorgt. Die Kamera selbst ist eine recht exklusive Mitchell Fries Kamera, ein älteres Modell, das sich als besonders geeignet für Motion Control Animation erwiesen hat und von Fries Engineering in Hollywood, USA für diese besondere Anwendung modifiziert wurde.
Der Computer führt nicht nur eine vorprogrammierte Bewegungs- und Beleuchtungssequenz aus, sondern kann auch einen manuellen Bewegungsablauf registrieren. Dies wird erreicht, indem alle relevanten Schrittmotoren mit einem Encoder ausgestattet werden, die präzise Positionierdaten zum Computer übertragen, wenn die Kamera manuell bewegt wird. Wenn die Sequenz registriert wurde, kann sie für das nachfolgende Filmen präzise wiederholt werden. |
|
 Bedienpult mit Computer und Schrittmotor-Treibern
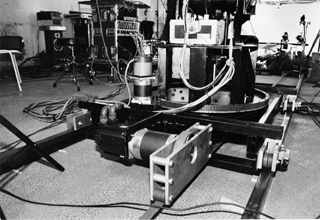 Der Kameraroboter in einem Studio zwischen Sequenzen für die LEGO-Kampagne von 1997
Allan O. Lückow betont, dass Schrittmotoren derzeit für diese Art des Filmens den Servomotoren überlegen sind, dank ihrer ausgezeichneten Wiederholungsgenauigkeit im Zeitbereich. Die Kameraposition muss zum Zeitpunkt der Aufnahme äußerst präzise sein, trotz unterschiedlicher Geschwindigkeiten. Natürlich ist es auch wichtig, dass die Kamera beim Filmen nicht wackelt, und große Aufmerksamkeit wurde dem Entfernen unerwünschter Resonanzen gewidmet, um sicherzustellen, dass die Konstruktion ausreichend steif und mechanisch gedämpft ist. Auch die Verwendung von Minischritt-Treibern für eine große Anzahl Schritte pro Umdrehung hat zum Vermeiden von Resonanzproblemen beigetragen.
Je nach den einzelnen Funktionen werden Zahnriemen-, Zahnrad- und Kettengetriebe sowie sehr hochwertige Lager verwendet. Diese Anwendung von Schrittmotoren und Controllern, die von JVL geliefert wurden, ist eine weitere gute Illustration der verschiedenartigen Anwendungsmöglichkeiten, wenn eine große Präzision gefordert wird. Allan O. Lückow weist darauf hin, dass einer der Gründe für die Wahl von JVL der ausgezeichnete technische Support war, den er im gesamten Entwicklungsprozess erhielt.
Weitere Informationen über:
|











JVL A/S Deutschland Moltkestr. 24 DE-72762 Reutlingen Deutschland
Tel: +49 7121 1377260 Fax: +49 7121 1377317 E-mail: sales@jvl.dk
Tel: +49 7121 1377260 Fax: +49 7121 1377317 E-mail: sales@jvl.dk
