

MIL – Auswahl der Teilenummern für integrierte Schrittmotor-Linearaktuatoren
So erstellen Sie eine Teilenummer:
|
1 |
2 |
3 |
4 |
5 |
- |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
MIL |
231 |
A |
[x] |
[y] |
- |
M5 |
H2 |
75 |
[z] |
[w] |
01 |
|
- Wählen Sie MIL, wenn Sie einen Motor mit integriertem Treiber oder Controller wünschen. Für einen Motor ohne integrierten Controller oder Treiber klicken Sie
hier.
- Die ersten beiden Zahlen geben die Größe des Motorflansches in Zoll an (z.B. 23 für 2,3 Zoll). Für die meisten Anwendungen reichen Motoren mit einer Magnetreihe aus. Zeichen Nr. 6 in der Typnummer gibt die Anzahl der Magnetreihen (Stacks) an. 1-Stack-Motoren sind MIL231 und 2-Stack-Motoren sind MIL232. Bestellen Sie 2-Stack-Motoren nur für besondere Zwecke, wenn kurzzeitig eine große Kraft bei sehr geringem Tastverhältnis benötigt wird. Beachten Sie, dass die Kraft immer unter der „Empfohlenen Belastungsgrenze" liegen sollte. Wenn die Belastung wiederholt über der Grenze liegt, wird die Mutter oder das Gewinde beschädigt. Setzen Sie den Aktuator nur kurzzeitig über seiner Grenze ein oder wenn ein Test ergeben hat, dass es gut funktioniert. Hinweis: MIL34x sind nur als 1-Stack-Motoren erhältlich.
- Wählen Sie für Motorströme
A
Motorströme von 0-3,00 Amp. (Nur auf Anfrage).
B
Motorströme von 3,01-6,00 Amp. MIL23x und MIL34.
C
Motorströme von 6,01-9,00 Amp. (Nur auf Anfrage).
D
Motorströme von 9,01-12,00 Amp. (Nur auf Anfrage).
-
Wählen Sie (mit x)
Für weitere Informationen hier klicken.
- Wählen Sie (mit y) die Gewindesteigung von 0,6 bis 25,4mm/Umdr. Siehe Tabelle auf Produktseite.
-
Wählen Sie die Schnittstellenkommunikation.Nur für MIL23 (Zum Anzeigen klicken)
Für Puls/Richtungstreiber SMD73 oder 74.
M1
M12 1 Stck. mit Spannungsversorgung und Puls/Richtungssignalen.
Für SMC75 Controller.
M5
M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485, IOA 1-4 ),
5-polige Buchse (RS485), 8-polige Buchse (5V seriell, IOA 5-8).
M6
M12 4 Stck. CANopen: 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485,
IOA 1-4), 8-polige Buchse (5V seriell, IOA 5-8), 5-poliger Stecker (CAN)
M9
M12 4 Stck. SSI: 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485, IOA
1-4), 8-poliger Stecker SSI (IOA 5-6), 5-polige Buchse RS485.
Nur für MIL34 (Zum Anzeigen klicken)
Q5
M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485),
17-polige Buchse (IO), 5-polige Buchse (RS485)
P6
M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485),
17-polige Buchse (IO), 5-polige Buchse (CANopen)
Q9
M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485),
17-polige Buchse (IO), 8-poliger Stecker (SSI + IO5-6)
EC
M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO),
2x 4-poliger Stecker (D) Ethernet Ethercat
EL
M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO),
2x 4-poliger Stecker (D) Ethernet Powerlink
EI
M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO),
2x 4-poliger Stecker (D) Ethernet Ethernet IP
EP
M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO),
2x 4-poliger Stecker (D) Ethernet Profinet
FB
M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485),
12-polige Buchse (IO), Antenne Wireless Bluetooth
EW
M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485),
12-polige Buchse (IO), Antenne Wireless LAN
-
Wählen Sie N0, H2 für MIL23. Wählen Sie N0, H2 oder H3 für MIL34. N0 bedeutet kein Encoder. H2 bedeutet halbabsoluter Encoder (im ausgeschalteten Zustand muss die Welle weniger als 180° gedreht werden), H3 bedeutet absoluter Encoder. Auflösung ist 1024 Impulse/Umdr. N0 ist Standard.
- Wählen Sie, welche Ansteuer- oder Controller-Elektronik der Motor enthalten soll.
- Wählen Sie (mit z) die Hub- oder Verfahrlänge (siehe die folgenden Optionen). Für E und N wählen Sie in 25-50mm-Schritten und C in vordefinierten Schritten. Bei Bestellmengen über 10 Stück können Motoren mit größerer Hublänge geliefert werden. Für weitere Informationen wenden Sie sich bitte an JVL.
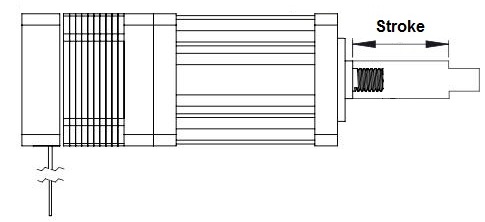
C - Captive (Zum Anzeigen klicken)
Kann mit Hub bis 500 mm geliefert werden. Nur für NEMA14, NEMA17 und NEMA23 erhältlich.
Hub
Code
[z]
Hub
mm
(Zoll)
A
12.70
(.5)
B
19.05
(.75)
C
25.40
(1.0)
D
31.80
(1.25)
E
38.10
(1.50)
F
50.80
(2.0)
G
63.50
(2.5)
N - Non-Captive (Zum Anzeigen klicken)
Hub
Code
[z]
Hub
mm
(Zoll)
Hub
Code
[z]
Hub
mm
(Zoll)
A
50
(1.968)
K
500
(19.685)
B
75
(2.952)
L
600
(23.622)
C
100
(3.937)
M
700
(27.559)
D
125
(4.921)
N
800
(31.496)
E
150
(5.905)
O
900
(35.433)
F
200
(7.874)
P
1000
(39.370)
G
250
(9.842)
H
300
(11.811)
I
350
(13.779)
J
400
(15.748)
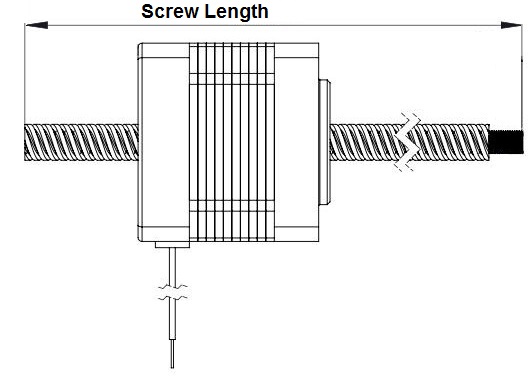
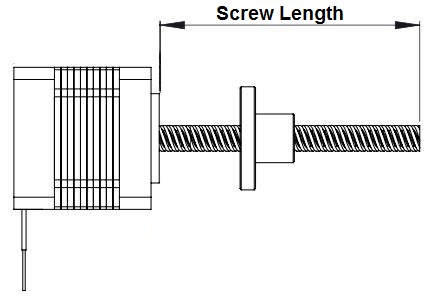
E - Äußere Mutter (Zum Anzeigen klicken)
In Schritten von 25-50 mm wählen. Beachten Sie, dass Verfahrlänge = Hublänge - Länge der Mutter.
Hub
Code
[z]
Hub
mm
(Zoll)
Hub
Code
[z]
Hub
mm
(Zoll)
A
50
(1.968)
K
500
(19.685)
B
75
(2.952)
L
600
(23.622)
C
100
(3.937)
M
700
(27.559)
D
125
(4.921)
N
800
(31.496)
E
150
(5.905)
O
900
(35.433)
F
200
(7.874)
P
1000
(39.370)
G
250
(9.842)
H
300
(11.811)
I
350
(13.779)
J
400
(15.748)
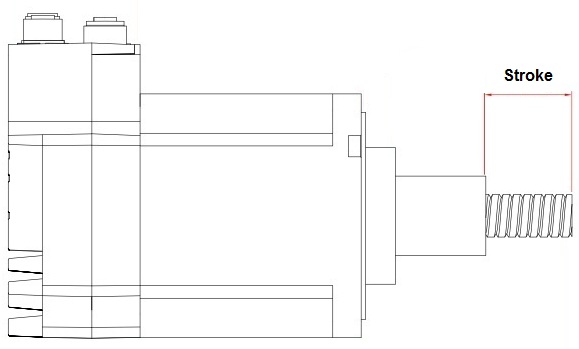
B - Kugelgewindetrieb (Zum Anzeigen klicken)
Hub
Code
[z]
Hub
mm
(Zoll)
Z
31
(1.220)
C
100
(3.937)
F
200
(7.874)
H
300
(11.811)
J
400
(15.748)
FOLGENDES sollte nur zur Teilenummer hinzugefügt werden, wenn Punkt 8 entweder SMD73 oder SMD74 ist
- Wählen Sie die Schrittauflösung mit [w].
1
1/1 Schritt (mit 200 Schritte/Umdr. Motor 200 Pulse/Umdr.)
2
1/2 Schritt (mit 200 Schritte/Umdr. Motor 400 Pulse/Umdr.)
4
1/4 Schritt (mit 200 Schritte/Umdr. Motor 800 Pulse/Umdr.)
5
1/5 Schritt (mit 200 Schritte/Umdr. Motor 1000 Pulse/Umdr.)
8
1/8 Schritt (mit 200 Schritte/Umdr. Motor 1600 Pulse/Umdr.)
- Klicken Sie, um eine Tabelle mit Optionen für Motorstrom und Ruhestrom-Verhältnis zu sehen. (Wenn der von Ihnen gewünschte Wert in der Tabelle nicht enthalten ist, informieren Sie sich bitte im Datenblatt für SMD73/74 über mögliche Kombinationen und teilen JVL Ihre Auswahl mit.)
01
2200 mA.
Verhältnis: 1/3
| A | Motorströme von 0-3,00 Amp. (Nur auf Anfrage). |
| B | Motorströme von 3,01-6,00 Amp. MIL23x und MIL34. |
| C | Motorströme von 6,01-9,00 Amp. (Nur auf Anfrage). |
| D | Motorströme von 9,01-12,00 Amp. (Nur auf Anfrage). |
Wählen Sie (mit x)
Wählen Sie die Schnittstellenkommunikation.
Nur für MIL23 (Zum Anzeigen klicken)
Für Puls/Richtungstreiber SMD73 oder 74.
| M1 | M12 1 Stck. mit Spannungsversorgung und Puls/Richtungssignalen. |
Für SMC75 Controller.
| M5 | M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485, IOA 1-4 ), 5-polige Buchse (RS485), 8-polige Buchse (5V seriell, IOA 5-8). |
| M6 | M12 4 Stck. CANopen: 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485, IOA 1-4), 8-polige Buchse (5V seriell, IOA 5-8), 5-poliger Stecker (CAN) |
| M9 | M12 4 Stck. SSI: 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485, IOA 1-4), 8-poliger Stecker SSI (IOA 5-6), 5-polige Buchse RS485. |
Nur für MIL34 (Zum Anzeigen klicken)
| Q5 | M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485), 17-polige Buchse (IO), 5-polige Buchse (RS485) |
| P6 | M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485), 17-polige Buchse (IO), 5-polige Buchse (CANopen) |
| Q9 | M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485), 17-polige Buchse (IO), 8-poliger Stecker (SSI + IO5-6) |
| EC | M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO), 2x 4-poliger Stecker (D) Ethernet Ethercat |
| EL | M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO), 2x 4-poliger Stecker (D) Ethernet Powerlink |
| EI | M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO), 2x 4-poliger Stecker (D) Ethernet Ethernet IP |
| EP | M12 4 Stck. 5-poliger Stecker (Versorgung), 17-polige Buchse (IO), 2x 4-poliger Stecker (D) Ethernet Profinet |
| FB | M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485), 12-polige Buchse (IO), Antenne Wireless Bluetooth |
| EW | M12 4 Stck. 5-poliger Stecker (Versorgung), 8-polige Buchse (RS485), 12-polige Buchse (IO), Antenne Wireless LAN |
C - Captive (Zum Anzeigen klicken)
Kann mit Hub bis 500 mm geliefert werden. Nur für NEMA14, NEMA17 und NEMA23 erhältlich.
|
|
|
|
In Schritten von 25-50 mm wählen. Beachten Sie, dass Verfahrlänge = Hublänge - Länge der Mutter.
|
|
|
|
FOLGENDES sollte nur zur Teilenummer hinzugefügt werden, wenn Punkt 8 entweder SMD73 oder SMD74 ist
| 1 | 1/1 Schritt (mit 200 Schritte/Umdr. Motor 200 Pulse/Umdr.) |
| 2 | 1/2 Schritt (mit 200 Schritte/Umdr. Motor 400 Pulse/Umdr.) |
| 4 | 1/4 Schritt (mit 200 Schritte/Umdr. Motor 800 Pulse/Umdr.) |
| 5 | 1/5 Schritt (mit 200 Schritte/Umdr. Motor 1000 Pulse/Umdr.) |
| 8 | 1/8 Schritt (mit 200 Schritte/Umdr. Motor 1600 Pulse/Umdr.) |
| 01 | 2200 mA. | Verhältnis: 1/3 |
Beispiele für Auswahl von Teilenummern
|
|
|
|
||
|---|---|---|---|---|
 |
MIL232BCK-M5H275G |
MIL - Motor mit JVL-Technologie, 232 - Double-Stack NEMA 23 Motor, A - Motorstrom 1,0 Amp, C - Captive, K - 2,54 mm Verfahrweg / Umdr., M5 - Schnittstellenkommunikation für SMC75, H2 - halbabsoluter Encoder, 75 - SMC75 Controller, G - 63,50 mm Hub. |
||
 |
MIL232BNK-
M6H275C |
MIL - Motor mit JVL-Technologie, 232 - Double-Stack NEMA 23 Motor, A - Motorstrom 2,5 Amp, N - Non-captive, K - 2,54 mm Verfahrweg / Umdr., M6 - Schnittstellenkommunikation für SMC75, H2 - halbabsoluter Encoder, 75 - SMC75 Controller, C - 100 mm Hub. |
||
 |
MIL341BBD-Q5H385B
|
MIL - Motor mit JVL-Technologie, 341 - Single-Stack NEMA 34 Motor, A - Motorstrom 3,0 Amp, B - Kugelgewindetrieb, D - 1,27 mm Verfahrlänge / Umdr., Q5 - Schnittstellenkommunikation, H3 - Absoluter Encoder, 85 - SMC85 Controller, B - 31,00 mm Hub. |
||
|
|
MIL232BNK-
M1H274C401 |
MIL - Motor mit JVL-Technologie, 232 - Double-Stack NEMA 23 Motor, A - Motorstrom 2,5 Amp, N - Non-captive, K - 2,54 mm Verfahrwerg / Umdr., M1 - Schnittstellenkommunikation für SMD74, H2 - halbabsoluter Encoder, 74 - SMD74 Treiber, C - 100 mm Hub, 4 - 1/4 Schritt, 01 - 2200 mA Strom mit 1/3 Ruhestrom-Verhältnis. |
||









JVL A/S Deutschland Moltkestr. 24 DE-72762 Reutlingen Deutschland
Tel: +49 7121 1377260 Fax: +49 7121 1377317 E-mail: sales@jvl.dk
Tel: +49 7121 1377260 Fax: +49 7121 1377317 E-mail: sales@jvl.dk
